Понятие об устойчивости сау. Прямые методы устойчивости. Критерий устойчивости Гурвица. Определение допустимых настроек сау. Устойчивость системы автоматического управления К инфраструктуре относят
Система автоматического управления имеет инерционности различной физической природы, которые замедляют процессы. Единичный скачок, который обычно рассматривается в качестве тестового сигнала САУ (рисунок 1), может быть разложен в ряд:

Рисунок 1. Типовая структура САУ
Наличие инерционностей
обуславливает сдвиг по фазе сигнала
обратной связи
 относительно входного
относительно входного ,
причем фазовый сдвиг зависит как от
номера гармоники, так и от постоянных
времени. Так для апериодического звена
1-го порядка фазовый сдвиг определяется:
,
причем фазовый сдвиг зависит как от
номера гармоники, так и от постоянных
времени. Так для апериодического звена
1-го порядка фазовый сдвиг определяется:
 .
(2)
.
(2)

Рисунок 2. Фазовый сдвиг на выходе САУ
Поскольку на входе
САУ действует бесконечный спектр
гармонических составляющих, то среди
них найдется такая гармоника, фазовый
сдвиг которой равен
 (рисунок
2), т.е. выходной сигнал будет в противофазе
с входным.
(рисунок
2), т.е. выходной сигнал будет в противофазе
с входным.
Так как обратная
связь отрицательная, то на входе системы
он действует в фазе с входным (пунктир
на рисунке 2), причем сигнал обратной
связи действует в тот момент, когда
 .
.
Пусть амплитуда
гармонической составляющей, фазовый
сдвиг которой
 ,
равна 0.5, а коэффициент передачи системы
по этой гармонике больше единице,
например равен 2. Тогда на выходе сигнал
после первого периода
,
равна 0.5, а коэффициент передачи системы
по этой гармонике больше единице,
например равен 2. Тогда на выходе сигнал
после первого периода ,
после второго периода
,
после второго периода ,
после третьего
,
после третьего и т.д., т.е. процесс расходящийся
(неустойчив) (рисунок 3).
и т.д., т.е. процесс расходящийся
(неустойчив) (рисунок 3).
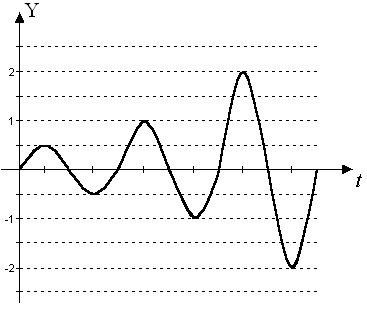
Рисунок 3.
Переходный процесс для гармоники
 при
k
>1.
при
k
>1.
Если коэффициент
передачи системы для гармоники, фазовый
сдвиг которой
 ,
меньше единицы, то процесс будет затухать
(система устойчива).
,
меньше единицы, то процесс будет затухать
(система устойчива).
Таким образом,
замкнутая система будет устойчивой,
если коэффициент передачи её для
гармонической составляющей, фазовый
сдвиг, которой равен
 ,
меньше единицы.
,
меньше единицы.
Если коэффициент передачи для указанной гармоники равен единице, то система находится на границе устойчивости и выходная координата изменяется по гармоническому закону с постоянной амплитудой.
Для системы (рисунок 1) выходная координата определяется:
Причинами отклонения
САУ от положения равновесия являются
изменение входной величины
 и возмущающих воздействий
и возмущающих воздействий .
.
Если и
и т.е. причины отклонения системы от
положения равновесия отсутствуют, то
т.е. причины отклонения системы от
положения равновесия отсутствуют, то .
.
Если при отсутствии
причин отклонения
 ,
, знаменатель
знаменатель ,
то это означает, что выходная координата
,
то это означает, что выходная координата может принимать любые отличные от нуля
значения, поскольку в этом случае имеем:
может принимать любые отличные от нуля
значения, поскольку в этом случае имеем:
 .
(4)
.
(4)
Следовательно, в системе возникает незатухающие колебания при условии:
 .
(5)
.
(5)
Заметим, что это условие похоже на условие самовозбуждения усилителя с ООС Баркгаузена: самовозбуждение системы имеет место, когда усиливается столько напряжения или другой величины, сколько его (её) отводится по каналу обратной связи:
 .
(6)
.
(6)
1.2 Определение устойчивости систем автоматического управления
Любая система автоматического управления (САУ) должна быть работоспособной, т.е. нормально функционировать при воздействий возмущений различного рода. Работоспособность САУ определяется ее устойчивостью, которая является одной из основных динамических характеристик системы.
Устойчивость - свойство системы возвращаться в исходное положение равновесия или близкий к нему режим после окончания действия возмущения, вызвавшего отклонение системы от положения равновесия. Неустойчивая работа может возникнуть в любой САУ с обратной связью, при этом, система удаляется от положения равновесия.
Если известна функция веса системы ω(t ) , то линейная система устойчива, если ω(t ) остается ограниченной при любых ограниченных по величине входных возмущениях:
 ,
(7)
,
(7)
где с - const .
Следовательно, об устойчивости системы можно судить по общему решению линеаризованного однородного дифференциального уравнения замкнутой САУ, поскольку устойчивость не зависит от вида описываемого возмущения. Система устойчива, если переходная составляющая затухает во времени:
 .
(8)
.
(8)
Если
 ,
то САУ
неустойчива.
,
то САУ
неустойчива.
Если
 не стремится ни к нулю, ни к бесконечности
то система находится на границе
устойчивости.
не стремится ни к нулю, ни к бесконечности
то система находится на границе
устойчивости.
Поскольку общее решение дифференциального уравнения зависит от вида корней характеристического уравнения САУ, то определение устойчивости можно производить без непосредственного решения однородного дифференциального уравнения.
Если характеристическое уравнение линейного дифференциального уравнения с постоянными коэффициентами САУ имеет вид
то его решение, следующее:
 ,
(10)
,
(10)
где c - постоянные интегрирования;
p t - корни характеристического уравнения.
Следовательно, САУ устойчива, если
 (11)
(11)
Таким образом, для того, чтобы линейная САУ была устойчивая, необходимо и достаточно, чтобы вещественные части всех корней характеристического уравнения системы были отрицательны
R e p i < 0, (12)
а) для вещественных корней p i < 0,
 ,
(12.а)
,
(12.а)
для вещественных корней p i > 0;
 ;
(12.б)
;
(12.б)
б) для комплексных корней типа p i =α± jβ при α< 0
, (12.в)
для комплексных корней p i =α± jβ при α> 0
 ,
(12.г)
,
(12.г)
Следовательно, САУ устойчива, если все корни характеристического уравнения (9) располагаются в левой полуплоскости комплексной плоскости корней. Система находится на границе устойчивости, если хотя бы один вещественный корень или пара комплексных корней находятся на мнимой оси. Различают апериодическую и колебательную границы устойчивости.
Если хотя бы один корень характеристического уравнения САУ равен нулю, то система находится на апериодической границе устойчивости. Характеристическое уравнение в этом случае (a n = 0) имеет следующий вид:
Система в том случае устойчива по отношению к скорости изменения регулируемой величины, по отношению же к реализуемой величине система нейтральна (нейтрально устойчивая система).
Если в характеристическом уравнении САУ имеется хотя бы пара чисто мнимых корней, то система находится на границе колебательной устойчивости. В этом случае в системе имеют место незатухающие гармонические колебания.
Таким образом, для выяснения устойчивости САУ следует решить характеристическое уравнение, т.е. найти его корни. Отыскание корней характеристического уравнения возможно, поскольку W 3 (p ) обычно представляет собой отношение двух алгебраических полиномов. Однако такой прямой метод для определения устойчивости оказывается весьма трудоемким, особенно при n > 3. Кроме того, для определения устойчивости необходимо знать только знаки корней и необязательно знать их значение, т.е. непосредственное решение характеристического уравнения дает “лишнюю информацию”. Поэтому для определения устойчивости целесообразно иметь косвенные методы определения знаков корней характеристического уравнения, не решая его. Эти косвенные методы определения знаков корней характеристического уравнения без непосредственного его решения - критерии устойчивости.
Понятие об устойчивости
Понятие устойчивости системы управления связано со способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния.
Устойчивость - это свойство системы возвращаться в исходное или близкое к нему установившееся состояние после всякого выхода из него в результате какого-либо воздействия.
Из данного определения следует, что устойчивость связана с характером переходных процессов и состоянием системы после окончания переходного процесса, т.е. является основной динамической характеристикой системы. Поэтому анализ устойчивости САУ является основной проблемой в теории автоматического управления.
В зависимости от характера переходного процесса различают три основных случая поведения системы после приложения возмущающего воздействия:
1) система не может восстановить равновесного состояния, значение управляемой переменной все больше отклоняется от заданного (рисунок 6.1, а); такой процесс называется расходящимся, а система – неустойчивой;
2) система возвращается к равновесному состоянию, значение управляемой переменной отличается от заданного на величину статической погрешности системы; такой переходной процесс будет сходящимся, а система - устойчивой (рисунок 6.1, б);
3) система характеризуется установившимся периодическим движением; такой процесс называется незатухающим колебательным, а система будет находится на границе асимптотической устойчивости (рисунок 6.1, в).
Рисунок 6.1 Поведение системы после приложения возмущающего воздействия
Рассмотрим, от чего зависит устойчивость системы и чем она определяется. Пусть динамика линейной системы описывается линейным дифференциальным уравнением с постоянными коэффициентами:
Решение такого линейного неоднородного уравнения в общем случае из двух составляющих:
![]() , (6.2)
, (6.2)
y уст (t) - частное решение неоднородного уравнения (6.1) с правой частью, описывающее вынужденный режим системы, устанавливающийся по окончании переходного процесса; такие режимы нами были рассмотрены в предыдущем параграфе;
y п (t) - общее решение однородного уравнения , которое описывает переходный процесс в системе, вызванный данным возмущением.
Очевидно, что система будет устойчива, если переходные процессы y п (t) , вызванные любыми возмущениями, будут затухающими, т.е. с течением времени y п (t) будет стремиться к нулю (рисунок 6.1, б).
Решение y п (t) однородного дифференциального уравнения имеет вид:
![]() , (6.3)
, (6.3)
C i - постоянные интегрирования, определяемые начальными условиями и возмущениями;
l i - корни характеристического уравнения:
Таким образом, переходный процесс y п (t) представляет собой сумму составляющих, число которых определяется числом корней l i характеристического уравнения (6.4).
В общем случае корни характеристического уравнения являются комплексными, образуя пары сопряженных корней:
где a i может быть как положительной, так и отрицательной величиной, причем корень вещественный, если b j =0 и мнимый, если a i =0 .
Каждая пара таких корней определяет составляющую переходного процесса, равную:
и определяются через и .
Нетрудно увидеть, что эта составляющая представляет собой синусоиду: с затухающими колебаниями, если a i <0 ; с расходящимися колебаниями, если a i >0 ; с незатухающими синусоидальными колебаниями при a i =0 .
Таким образом, условием затухания данной составляющей переходного процесса является отрицательность действительной части корня характеристического уравнения системы.
Если b=0 , то процесс определяется только вещественной частью корня a и является апериодическим. В общем случае, переходный процесс в системе состоит из колебательной и апериодической составляющих. Если хотя бы один корень имеет положительную действительную часть, он даст расходящуюся составляющую переходного процесса и система будет неустойчива. Отсюда следует, что общим условием затухания всех составляющих, а значит и всего переходного процесса в целом, является отрицательность действительной части всех корней характеристического уравнения системы, т.е. всех полюсов (нулей знаменателя) передаточной функции системы.
Наиболее наглядно вышеизложенное можно проиллюстрировать, если изобразить корни характеристического уравнения на комплексной плоскости (рисунок 6.2). В этом случае найденное выше условие устойчивости можно сформулировать так: условием устойчивости системы является расположение всех корней характеристического уравнения системы, т.е. полюсов передаточной функции системы, в левой комплексной полуплоскости, или, говоря короче, все корни должны быть «левыми». Наличие корня на мнимой оси означает, что система находится на границе устойчивости.

Рисунок 6.2 Изображение корней характеристического уравнения на комплексной плоскости
Итак, на первый взгляд задача исследования устойчивости не представляет затруднений, так как достаточно определить расположение корней характеристического уравнения на комплексной плоскости. Однако определение корней характеристического уравнения, имеющего порядок выше третьего, сопряжено со значительными трудностями, в связи с чем и возникает проблема исследования устойчивости систем, динамические процессы в которых описываются дифференциальными уравнениями высокого порядка.
Частичное решение этой проблемы найдено косвенным путем. Разработан ряд признаков, по которым можно судить о знаках действительных частей корней характеристического уравнения системы и тем самым об устойчивости системы, не решая самого характеристического уравнения. При этом обычно встречаются две постановки задачи исследования устойчивости системы:
1)заданы все параметры системы и необходимо определить, устойчива ли система при этих значениях параметров;
2)необходимо определить значения некоторых параметров (при заданных остальных), при которых система устойчива.
Математическая формулировка условий, которым должны удовлетворять коэффициенты характеристического уравнения или какие-либо функции этих коэффициентов, чтобы система была устойчивой, называется критерием устойчивости.
Необходимым условием работоспособности системы автоматического управления (САУ), является её устойчивость. Под устойчивостью принято понимать свойство системы восстанавливать состояние равновесия, из которого она была выведена под влиянием возмущающих факторов после прекращения их воздействия .Постановка задачи
Получение простого, наглядного и общедоступного инструмента для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.Теория просто и кратко
Анализ устойчивости системы по методу Михайлова сводится к построению характеристического многочлена замкнутой системы (знаменатель передаточной функции), комплексной частотной функции (характеристического вектора):Где и – соответственно вещественная и мнимая части знаменателя передаточной функции, по виду которой можно судить об устойчивости системы.
Замкнутая САУ устойчива, если комплексная частотная функция , начинаясь на
стрелки начало координат, проходя последовательно n квадрантов, где n – порядок характеристического уравнения системы, т. е.
 (2)
(2)

Рисунок 1. Амплитудно-фазовые характеристики (годографы) критерия Михайлова: а) – устойчивой системы; б) – неустойчивой системы (1, 2) и системы на границе устойчивости (3)
САУ электроприводом манипулятора промышленного робота (МПР)

Рисунок 2 – Структурная схема САУ электроприводом МПР
Передаточная функция данной САУ имеет следующее выражение :

(3)
где kу – коэффициент усиления усилителя, kм – коэффициент пропорциональности частоты вращения двигателя величине напряжения на якоре, Tу – электромагнитная постоянная времени усилителя, Tм – электромеханическая постоянная времени двигателя с учётом инерции нагрузки (по своим динамическим характеристикам двигатель представляет собой передаточную функцию последовательно соединённых инерционного и интегрирующего звеньев), kдс – коэффициент пропорциональности между входной и выходной величинами датчика скорости, K – коэффициент усиления главной цепи: .
Численные значения в выражение передаточной функции следующие:
K = 100 град / (В∙с); kдс = 0,01 В / (град∙с); Tу = 0,01 с; Tм = 0,1с.
Заменив s на :
(4)
Решение на Python
Здесь следует отметить, что подобные задачи на Python ещё никто не решал, во всяком случае я не нашёл. Это было связано с ограниченными возможностями работы с комплексными числами. С появлением SymPy можно сделать следующее:From sympy import *
T1,T2,w =symbols("T1 T2 w",real=True)
z=factor ((T1*w*I+1)*(T2*w*I+1)*w*I+1)
print ("Характеристический многочлен замкнутой системы -\n%s"%z)
Где I мнимая единица, w- круговая частота, T1= Tу = 0.01 ,T2= Tм = 0.1
Получим развёрнутое выражение для многочлена:
Характеристический многочлен замкнутой системы –
Сразу видим, что многочлен третьей степени. Теперь получим мнимую и действительную части в символьном отображении:
Zr=re(z)
zm=im(z)
print("Действительная часть Re= %s"%zr)
print("Мнимая часть Im= %s"%zm)
Получим:
Действительная часть Re= -T1*w**2 - T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w
Сразу видим вторую степень действительной части и третью мнимой. Подготовим данные для построения годографа Михайлова. Введём численные значения для T1 и T2, и будем менять частоту от 0 до 100 с шагом 0.1 и построим график:
From numpy import arange
import matplotlib.pyplot as plt
x=
y=
plt.plot(x, y)
plt.grid(True)
plt.show()

Из графика не видно, то годограф начинается на действительной положительной оси. Нужно изменить масштабы осей. Приведу полный листинг программы:
From sympy import *
from numpy import arange
import matplotlib.pyplot as plt
T1,T2,w =symbols("T1 T2 w",real=True)
z=factor((T1*w*I+1)*(T2*w*I+1)*w*I+1)
print("Характеристический многочлен замкнутой системы -\n%s"%z)
zr=re(z)
zm=im(z)
print("Действительная часть Re= %s"%zr)
print("Мнимая часть Im= %s"%zm)
x=
y=
plt.axis([-150.0, 10.0, -15.0, 15.0])
plt.plot(x, y)
plt.grid(True)
plt.show()
Получим:
-I*T1*T2*w**3 - T1*w**2 - T2*w**2 + I*w + 1
Действительная часть Re= -T1*w**2 - T2*w**2 + 1
Мнимая часть Im= -T1*T2*w**3 + w

Теперь уже видно, что годограф начинается на действительной положительной оси. САУ устойчива, n=3, годограф совпадает с приведённым на первом рисунке.
Дополнительно убедится в том, что годограф начинается на действительной оси можно дополнив программу следующим кодом для w=0:
Print("Начальная точка М(%s,%s)"%(zr.subs({T1:0.01,T2:0.1,w:0}),zm.subs({T1:0.01,T2:0.1,w:0})))
Получим:
Начальная точка М(1,0)
САУ сварочного робота
Наконечник сварочного узла (НСУ) подводится к различным местам кузова автомобиля, быстро и точно совершает необходимые действия. Требуется определить устойчивость по критерию Михайлова САУ позиционированием НСУ.
Рисунок 3. Структурная схема САУ позиционированием НСУ
Характеристическое уравнение данной САУ будет иметь вид :
Где K – варьируемый коэффициент усиления системы, a – определённая положительная константа. Численные значения: K = 40; a = 0,525.
Решение на Python
rom sympy import * from numpy import arange import matplotlib.pyplot as plt w =symbols(" w",real=True) z=w**4-I*6*w**3-11*w**2+I*46*w+21 print("Характеристический многочлен замкнутой системы -\n%s"%z) zr=re(z) zm=im(z) print("Начальная точка М(%s,%s)"%(zr.subs({w:0}),zm.subs({w:0}))) print("Действительная часть Re= %s"%zr) print("Мнимая часть Im= %s"%zm) x= y= plt.axis([-10.0, 10.0, -50.0, 50.0]) plt.plot(x, y) plt.grid(True) plt.show()Получим:
Характеристический многочлен замкнутой системы - w**4 - 6*I*w**3 - 11*w**2 + 46*I*w + 21
Начальная точка М(21,0)
Действительная часть Re= w**4 - 11*w**2 + 21
Мнимая часть Im= -6*w**3 + 46*w

Построенный годограф Михайлова, начинаясь на вещественной положительной оси (М (21,0)), огибает в положительном направлении начало координат, проходя последовательно четыре квадранта, что соответствует порядку характеристического уравнения. Значит, данная САУ позиционированием НСУ – устойчива.
Выводы
При помощи модуля SymPy Python получен простой и наглядный инструмент для решения задач расчёта устойчивости систем автоматического управления, что является обязательным условием работоспособности любого промышленного робота и манипулятора.Ссылки
- Дорф Р. Современные системы управления / Р. Дорф, Р. Бишоп. – М.: Лаборатория Базовых Знаний, 2002. – 832 с.
- Юревич Е.И. Основы робототехники 2-е издание / Е.И. Юревич. – С-Пб.: БХВ-Петербург, 2005. – 416 с.
Одной из важнейших характеристик АСУ является ее устойчивость.
Устойчивость САУ – свойство системы возвращаться в состояние равновесия после прекращения изменения воздействия, выведшего систему из этого состояния.
Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы.
Неустойчивая система не возвращается в состояние равновесия, а непрерывно удаляется от него. От устойчивости САУ зависит ее работоспособность. Система, не обладающая устойчивостью, вообще не способна выполнять функции управления и имеет нулевую или даже отрицательную эффективность. Неустойчивая система может привести управляемый объект в аварийное состояние. Поэтому проблема устойчивости систем является одной из центральных в теории автоматического управления.

Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы.
Если система описывается линейным дифференциальным уравнением, то ее устойчивость не зависит от величины возмущения. Линейная система, устойчивая при малых возмущениях, будет устойчива и при больших. нелинейные системы могут быть устойчивы при малых возмущениях и неустойчивы при больших.
Проблема устойчивости обычно возникает в замкнутых системах из-за влияния обратной связи. Поэтому в дальнейшем устойчивость исследуется на примерах замкнутых систем, хотя методы исследования устойчивости универсальны.

Неустойчивость САУ возникает, как правило, из-за неправильного (положительного) или очень сильного действия главной обратной связи. В результате чего в систему в режиме гармонических колебаний непрерывно поступает (закачивается) энергия. Энергия системы увеличивается. Увеличиваются и связанные с ней режимные параметры, например, регулируемая величина. Такое явление в технике получило название резонанса.
Причинами неправильного действия главной обратной связи САУ являются:
Выполнение главной обратной связи САУ по ошибке положительной вместо отрицательной, что практически при любых параметрах делает систему неустойчивой.
Значительная инерционность элементов замкнутого контура САУ (например, объекта управления), из-за которой в режиме колебаний системы сигнал главной обратной связи (например, управляемая величина) значительно отстает от входного сигнала (например, задающего воздействия) и оказывается с ним в фазе. Это означает, что связь, выполненная конструктивно как отрицательная, в динамическом режиме (режиме гармонических колебаний) начинает на определенной частоте действовать как положительная. Это ведет к раскачиванию системы и нарушению ее устойчивости.
Общее (математическое) условие устойчивости
Согласно данному выше физическому определению устойчивость определяется характером движения системы, когда воздействия, выведшие ее из состояния равновесия, прекратили действовать или изменяться во времени. Такое движение системы называют свободным. Оно происходит за счет внутренней энергии самой системы и зависит только от ее свойств (параметров). Для линейной или линеаризованной САУ:
 (1)
(1)
С математической точки зрения:
Система устойчива, если свободная составляющая x(t) переходного процесса с течением времени стремится к нулю.

![]()

Общее математическое условие устойчивости :
для устойчивости линейной САУ необходимо и достаточно, чтобы действительные части всех корней характеристического уравнения системы были отрицательными (или чтобы все корни характеристического уравнения системы располагались в левой части комплексной плоскости).
Линейные уравнения вида (1), как правило, получаются в результате упрощений и линеаризации исходных нелинейных уравнений. Возникает вопрос: в какой мере оценка устойчивости по линеаризованному уравнению будет справедлива для реальной системы, и не окажут ли существенное влияние на результат анализа отброшенные при линеаризации члены разложения? Ответ на него был дан русским математиком А. М. Ляпуновым в 1892 г. в работе «Общая задача об устойчивости движения». Он сформулировал и доказал следующую теорему:
если характеристическое уравнение линеаризованной системы имеет хотя бы один нулевой корень или одну пару мнимых корней, то судить об устойчивости реальной системы по линеаризованному уравнению нельзя . Отброшенные при линеаризации малые члены могут сделать систему неустойчивой, и поэтому устойчивость реальной системы необходимо оценивать по исходному нелинейному уравнению.
Понятие о качестве управления в ТАУ
Качество САУ – совокупность свойств, обеспечивающих эффективное функционирование системы в целом.
Качество управления САУ – совокупность свойств САУ, характеризующих точность поддержания управляемой величины на заданном уровне в установившихся и переходных режимах.
Точность
Назначение САУ заключается в поддержании равенства
![]()
Основной способ снижения ошибки в САУ ОС – увеличение коэффициента усиления регулятора.
Однако это не значит, что можно таким образом достичь любой желаемой точности. Здесь начинает сказываться одно из фундаментальных противоречий в рамках теории управления - противоречие между точностью системы и запасом устойчивости. При чрезмерном увеличении коэффициента усиления возможна потеря устойчивости замкнутой системы. Повышение точности всегда приводит к уменьшению запаса устойчивости по амплитуде.
Различают точность, рассматриваемую в переходном процессе - динамическая точность , и точность в установившемся режиме - статическая точность .
Статическая точность в следящей системе определяется при гармоническом входном воздействии с использованием передаточной функции по ошибке.

Задав допустимые границы точности по амплитуде и по фазе, получим область частот, где гарантируется данная точность - это полоса пропускания.
Динамическая точность относится к более сложным задачам анализа систем, т.к. требует изучения всего переходного процесса.
Точность САУ в переходном режиме оценивают при помощи прямых и косвенных показателей качества.
Прямые показатели качества определяют по графику переходного процесса, возникающего в системе при ступенчатом внешнем воздействии.
Косвенные показатели качества определяют по распределению корней характеристического уравнения или по частотным характеристикам системы.
Различают колебательный (1), апериодический (2) и монотонный (3) типовые переходные процессы:

Познакомимся с показателями качества переходного процесса, вызванного ступенчатым изменением задающего воздействия:

Перерегулирование σ - величина, равная отношению первого максимального отклонения управляемой величины x(t) от ее установившегося значения x(∞) к этому установившемуся значению:

Качество управления считается удовлетворительным, если перерегулирование не превышает 30…40%.
Степень затухания :

Интенсивность затухания колебаний в системе считается удовлетворительной, если ψ = 0,75…0,95.
Длительность переходного процесса (время регулирования) t п – интервал времени от момента приложения ступенчатого воздействия до момента, после которого отклонения управляемой величины x(t) от ее нового установившегося значения x(∞) становятся меньше некоторого заданного числа δ п, т. е. до момента, после которого выполняется условие
⎢ x(t) - x(∞) ⎢ ≤ δ п.
В промышленной автоматике величину δ п обычно принимают равной 5% от установившегося значения x(∞).
Колебательность N – число переходов управляемой величины x(t) через ее установившееся значение x(∞) за время переходного процесса t п .
Рассмотренные прямые показатели качества удобно использовать в тех случаях, когда график переходного процесса x(t) можно получить экспериментально в реальной САУ или путем моделирования системы на ЭВМ.
Федеральное Агентство Железнодорожного транспорта
Федеральное государственное бюджетное образовательное учреждение
Высшего профессионального образования
Петербургский государственный университет путей сообщения
Кафедра «Электрическая тяга»
Якушев А.Я., Викулов И.П., Цаплин А.Е.
Влияние параметров САу
На устойчивость и качество регулирования
Методические указания к лабораторной работе
Санкт-Петербург
Цель работы - изучение основных параметров а также их соотношений, определяющих устойчивость и динамические свойства систем автоматического управления (САУ), характеризуемые видом переходных процессов изменения выходной переменной при возмущающих воздействиях.
Структурная схема САУ
Анализ динамических свойств системы автоматического управления обычно выполняют аналитически по структурной схеме или используя математическую модель системы. Оценку динамических свойств производят по реакции выходной переменной y(t) в виде переходной функции системына ступенчатое изменение задающего Dg×1(t) или возмущающего DZ×1(t) воздействий.
Структурной называют схему, составленную из операторных передаточных функций звеньев направленного действия, образующих систему автоматического управления. Основой для составления структурной схемы служит функциональная схема САУ (рис.1, а) и динамические характеристики составляющих ее элементов. Динамические характеристики функциональных элементов в структурной схеме представлены операторными передаточными функциями (рис. 1,б). Задающее воздействие g(t), возмущающее воздействие Z(t), выходная переменная y(t) на структурной схеме представлены операторными изображениями их конечных изменений, Dg(p), DZ(p), DY(р) относительноустановившихся уровней. Изменение выходной переменной DY(р) определяется операторными передаточными функциями замкнутой системы по задающему Dg(р) ивозмущающему DZ(р) воздействиям.

Динамические характеристики функциональных элементов САУ в большинстве случаев могут быть представлены апериодическими звеньями 1-го порядка, а также безынерционными усилительными звеньями. Характеристики более сложных функциональных элементов могут быть представлены двумя или несколькими звеньями.
В работе производится исследование переходных процессов автоматического регулирования при возмущающих воздействиях DZ=1(t) применительно к простейшей системе автоматического управления. На структурной схеме (рис. 1,б) функциональные элементы исследуемой системы: объект регулирования, исполнительное устройство, элемент обратной связи представлены апериодическими звеньями 1-го порядка. Динамические параметры функциональных элементов имеют обозначения: Т ор , Т иу , Т ос - постоянные времени, , , - коэффициенты усиления. В исследуемой системе применен регулятор с пропорциональным законом регулирования, характеризуемым коэффициентом усиления . Таким образом, анализ влияния параметров системы автоматического управления на её устойчивость и форму переходного процесса изменения выходной переменной производится применительно к системе 3-го порядка, составленной из усилительного звена и апериодических звеньев 1-го порядка.
Влияние параметров САУ на её устойчивость.
Устойчивостью системы автоматического управления называют способность системы при воздействиях на неё возмущающих факторов приходить с течением времени к равновесному состоянию. Различают устойчивость статическую и динамическую.
Статическая устойчивостьобеспечивается наличием отрицательной главной обратной связи и отсутствием местных положительных обратных связей в структурной схеме системы автоматического управления. Поэтому ее называют схемной устойчивостью. Аналитические условия обеспечения статической устойчивости определяется положительностью всех коэффициентов общего дифференциального или характеристического уравнений системы. Это условие называют необходимым условием устойчивости.
Характеристическое уравнение представляет собой алгебраическое уравнение, в котором показатели степени независимой переменной соответствуют порядку производных выходной переменной общего дифференциального уравнения системы:
Коэффициенты слагаемых характеристического уравнения равны коэффициентам при производных выходной переменной общего дифференциального уравнения системы автоматического управления:
Характеристическое уравнение может быть получено из полинома знаменателя передаточной функции замкнутой системы при использовании для анализа структурной схемы САУ .
Для исследуемой системы автоматического управления, структурная схема которой показана на рис. 1,б, передаточная функция замкнутой системы по возмущающему воздействию DZ(р) имеет следующий вид:
 (1)
(1)
В выражении (1) обозначен К 0 общий коэффициент усиления, равный произведению коэффициентов усиления всех звеньев, входящих в замкнутый контур структурной схемы САУ:
![]() . (2)
. (2)
Для получения характеристического уравнения системы надо приравнять нулю знаменатель передаточной функции (1):
В результате преобразования получено характеристическое уравнение системы автоматического управления, представляющее собой алгебраическое уравнение третьей степени:
Коэффициенты этого уравнения определяются следующими выражениями:
 . (4)
. (4)
Из соотношений формул (4) видно, что все коэффициенты характеристического уравнения (3) положительны, следовательно, обеспечено необходимое условие устойчивости, т.е. исследуемая система автоматического управления статически устойчива.
Для оценки динамической устойчивости разработаны способы, определяющие достаточные условия, называемые критериями устойчивости. Одним из них является алгебраический критерий Гурвица. Согласно критерию устойчивости Гурвица условие динамической устойчивости системы третьего порядка определяется соотношением коэффициентов характеристического уравнения (3) :
Из соотношения (5) следует, что система будет устойчива, если общий коэффициент усиления системы , входящий в выражение коэффициента а 3 характеристического уравнения системы, будет меньше величины:
 .
.
После подстановки в это неравенство выражений для коэффициентов (4) характеристического уравнения и некоторых преобразований получено соотношение для общего коэффициента усиления К 0 устойчивой системы 3-го порядка:
 .
(6)
.
(6)
Критическим называют общий коэффициент усиления К 0кр, определяемый для системы 3-го порядка равенством (6), при котором система автоматического управления находится в граничном состоянии устойчивости. Из соотношения (6) следует, что при равенстве постоянных времени апериодических звеньев Т ор =Т иу =Т ос, определяется наименьшее значение критического коэффициента усиления системы 3- го порядка К 0кр = 8.
При изменении соотношений постоянных времени критический коэффициент усиления системы возрастает, например, при ![]() и
и ![]() , К
0кр =
16,8.
, К
0кр =
16,8.
Работоспособность системы автоматического управления определяется не только устойчивостью, но и приемлемым характером переходного процесса выходной переменной при возмущающих воздействиях на систему. Практически величина общего коэффициента усиления К 0 , при которой характер и длительность переходного процесса будут удовлетворительными, должна быть примерно в 4…5раз меньше критического значения. Значит для приведённых в примерах соотношений постоянных времени общий коэффициент усиления реальной системы с удовлетворительным переходным процессом должен быть в пределах К 0 =2...4.





